-
-
-
Tổng tiền thanh toán:
-










Sản phẩm đã được thêm vào giỏ hàng
Số lượng:
Tổng tiền:

The OPC Specification is based on the OLE, COM, and DCOM technologies developed by Microsoft for the Microsoft Windows operating system family. It is a standard and common interface of Windows O.S. to achieve the automation and control agreements, which provides the bridge between the hardware manufacturers and software developers
Phần mềm OPC Server CAN BUS ICP DAS CAN OPC Server
The OPC Specification is based on the OLE, COM, and DCOM technologies developed by Microsoft for the Microsoft Windows operating system family. It is a standard and common interface of Windows O.S. to achieve the automation and control agreements, which provides the bridge between the hardware manufacturers and software developers. By using the NAPOPC.CAN DA server, the software engineers would develop their control systems by the familiar SCADA toolkit and any other software which supports OPC client functionality. The NAPOPC.CAN DA server supports almost all CAN series products. Users could apply a variety of CAN products of ICP DAS in the OPC server for their application.
Applications
1. Smart parking lot with CAN bus

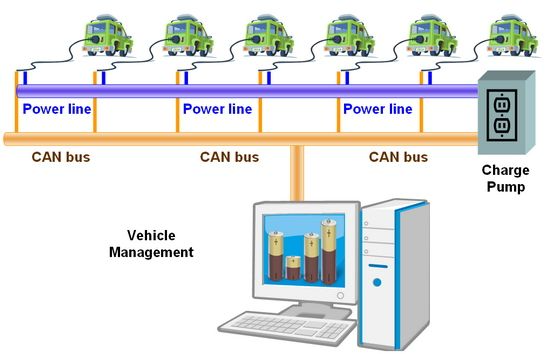
2. Electrical Vehicle charge station

NAPOPC.CAN DA server would show all VxCAN port information which retrieved from the VxCAN driver. The user can select the correct CAN device from the drop-down list and set the CAN parameter. After pressing the “OK” button, the CAN device will active.
“VxCAN” driver is the developed by the ICP DAS. By using the “VxCAN” driver, the users can easily integrate different interfaces of CAN devices like RS-232/CAN converter、Ethernet/CAN、USB/CAN converter, and PCI series CAN board. The “VxCAN” driver will receive the CAN message and send the CAN message on your demand. The users need not develop the socket or serial COM functions before using Ethernet/CAN or RS-232/CAN converters. The “VxCAN” driver has already done. The “VxCAN” driver can reduce the complexity of the application code. For example, if the users have no idea to develop the socket program, they still can use the Ethernet/CAN converter to complete a stable control system by using the “VxCAN” driver. The users can spend most of the time on their application but not on the CAN converter.
When “VxCAN” starting, it will detect all CAN devices in the users’ PC and assign a “VxCAN port” number. The users can image the “VxCAN port” as the COM port. The only difference is that the “VxCAN port” is a CAN port mapped to the CAN devices. If the users do not change the CAN devices in their PC, the “VxCAN port” number would not change. There is an example below.

Số lượng:
Tổng tiền: